Pebble
MQTT-based robot control architecture for connecting robots with different body plans through one message standard.
Robotics, Godot software, MQTT experiments, small web tools, and public project files.
This server hosts personal projects, class work, robotics tools, public downloads, and web exports I use while learning and building.
I'm Andrew Mattson, a computer science student at the University of Alaska Fairbanks. I work mostly around robotics, Godot game and software development, MQTT-based systems, and simulation.
MQTT-based robot control architecture for connecting robots with different body plans through one message standard.


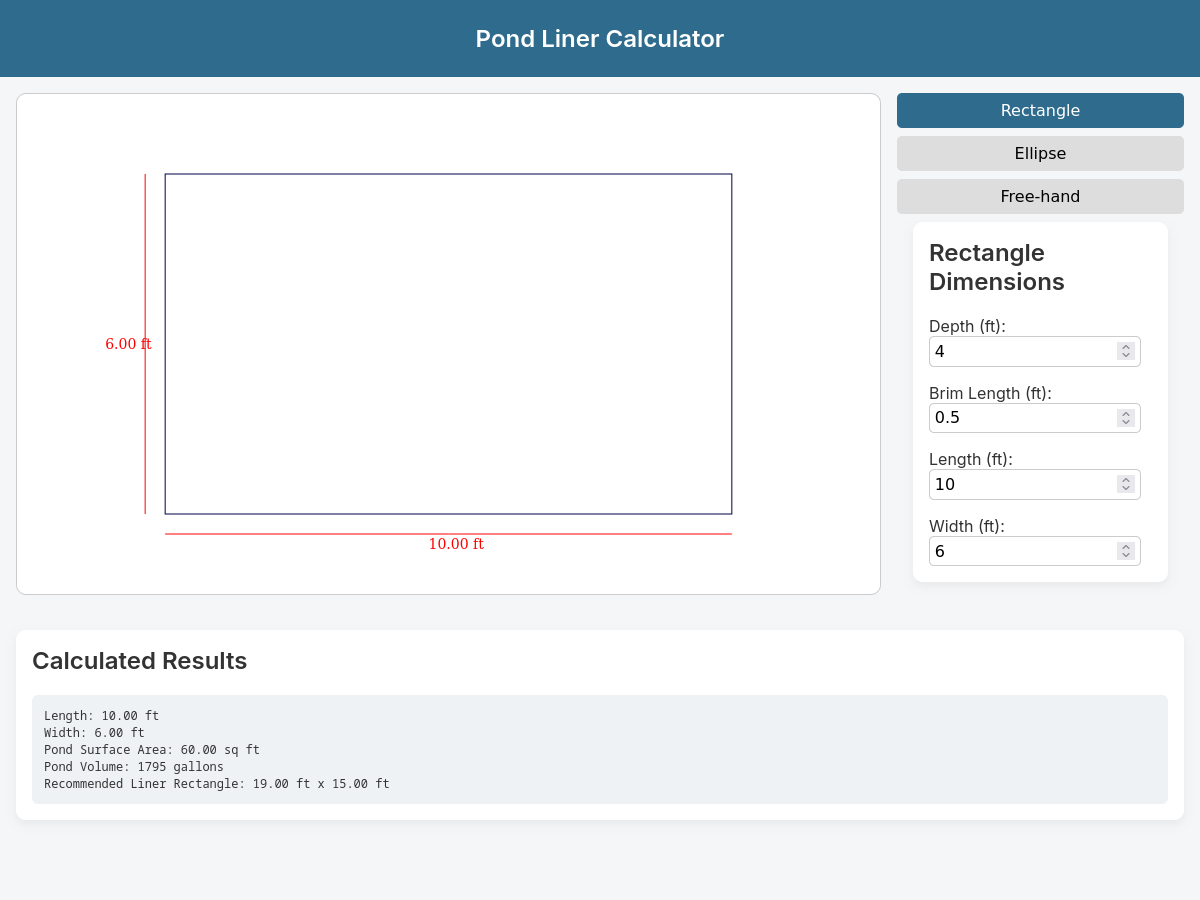
Small calculator for estimating liner size for rectangular, elliptical, and free-hand pond shapes.
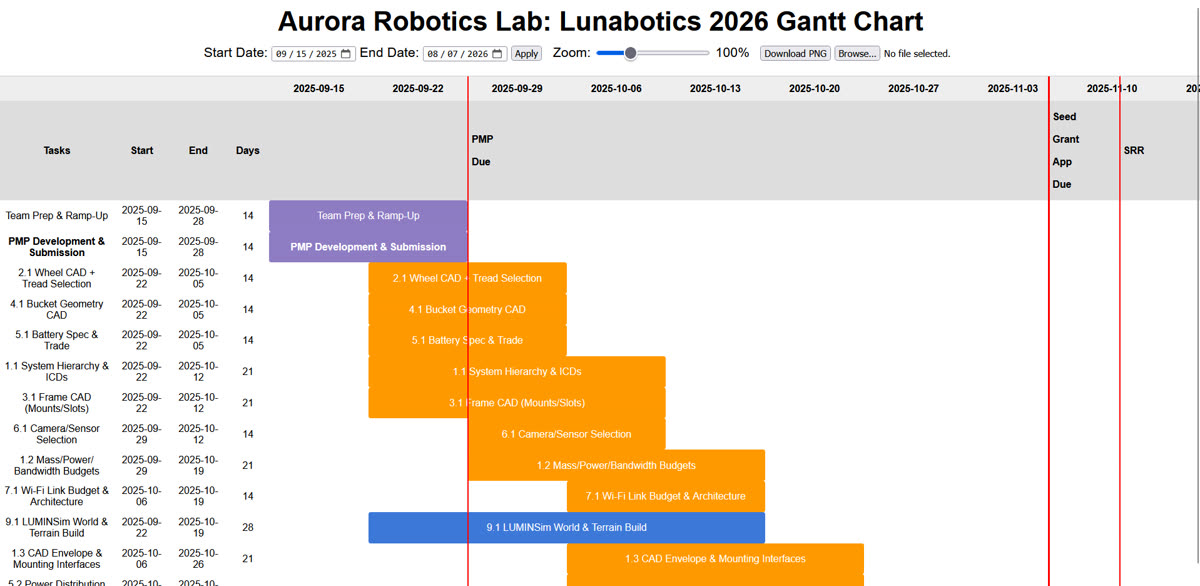
JSON-driven Gantt chart viewer made for Aurora Robotics project planning.
Blank input-capture page for absorbing mouse, keyboard, touch, and navigation input where browsers allow it.